СЕРИЈА ЕЛЕКТРИЧНИХ ХВАТАЉКИ HITBOT – Z-EFG-L колаборативни електрични хватаљка



Главна категорија
Индустријска роботска рука / Колаборативна роботска рука / Електрична хватаљка / Интелигентни актуатор / Решења за аутоматизацију
Примена
Роботски хватаљке серије SCIC Z-EFG су мале величине са уграђеним серво системом, што омогућава прецизну контролу брзине, положаја и силе стезања. SCIC најсавременији систем хватања за аутоматизациона решења отвориће вам нове могућности за аутоматизацију задатака које никада нисте сматрали могућим.

Карактеристика

· Брзо отварање и затварање
· Хватање у уском простору, хватање крхке робе
·Ексклузивни електрични хватаљ са ходом од 8 мм за роботску руку са шест оса
· Дуг век трајања: десетине милиона циклуса, што превазилази ваздушне канџе
· Уграђени контролер: мали простор, једноставна интеграција
· Режим управљања: Улаз/Излаз
Специјални дизајн за роботску руку са шест оса, ход 12 мм, електрични хватаљка
Укључи и користи
Специјални дизајн за роботску руку са шест оса
Висока фреквенција
Најкраће време једног хода је само 0,2 с
Интегрисано управљање и контролер
Интегрисани серво систем, „укључи и користи“
Контролер је уграђен
Заузима мало простора, погодно за интеграцију.
Реп се може променити
Његов реп се може мењати, како би се задовољили различити захтеви.
Меко стезање
Може да стегне крхке предмете

● Промовисање револуције у замени пнеуматских хватаљки електричним хватаљкама, прва електрична хватаљка са интегрисаним серво системом у Кини.
● Савршена замена за ваздушни компресор + филтер + соленоидни вентил + вентил за гас + пнеуматски хватаљ
● Вишеструки век трајања, у складу са традиционалним јапанским цилиндром




Параметар спецификације
Z-EFG-L је роботски електрични паралелни хватаљка са 2 прста и силом хватања од 30N, који подржава меко стезање, као што је хватање јаја, хлеба, цуцли итд.
| Модел бр. Z-EFG-L | Параметри |
| Укупан мождани удар | 12 мм |
| Сила хватања | 30N |
| Поновљивост | ±0,02 мм |
| Препоручена тежина хватања | ≤0,5 кг |
| Режим преноса | Зупчаста летва + вођица са укрштеним ваљцима |
| Допуњавање масти покретним компонентама | Сваких шест месеци или 1 милион покрета / време |
| Време једносмерног замахног кретања | 0,2 с |
| Радни температурни опсег | 5-55℃ |
| Радни опсег влажности | RH35-80 (без мраза) |
| Режим кретања | Два прста се померају хоризонтално |
| Контрола можданог удара | Не подесиво |
| Подешавање силе стезања | Не подесиво |
| Тежина | 0,4 кг |
| Димензије (Д*Ш*В) | 68*68*113,6 мм |
| Положај контролера | Уграђено |
| Моћ | 5W |
| Тип мотора | DC без четкица |
| Називни напон | 24V ± 10% |
| Вршна струја | 1A |
| Прилагодљива роботска рука са шест оса | УР, Аубо |
Шестоосна роботска рука, „укључи и користи“
Електрични хватаљка Z-EFG-L може бити компатибилна са главним колаборативним роботским рукама на тржишту, има висок степен заштите и велико оптерећење.


Интегрисано управљање и контролер
З-ЕФГ-Л је мали електрични хватаљка који има интегрисани серво систем, има ход од 12 мм, сила стезања је 30 Н, један З-ЕФГ-Л може заменити ваздушни компресор + филтер + електронски магнетни вентил + вентил за гас + ваздушну хватаљку.
Мала фигура, флексибилна за инсталацију
Величина електричне хватаљке Z-EFG-L је Д68*Ш68*В113,6 мм, њена структура је компактна, подржава вишеструке начине инсталације, контролер је уграђен, заузима мали простор, па се лако може носити са различитим захтевима за задатке стезања.


Брза реакција, контрола прецизности
Најкраће време једног хода је 0,45 с, његов реп се може лако мењати, купци могу бити флексибилни да подесе електрични хватаљку према својим производним захтевима.
Дијаграм инсталације димензија
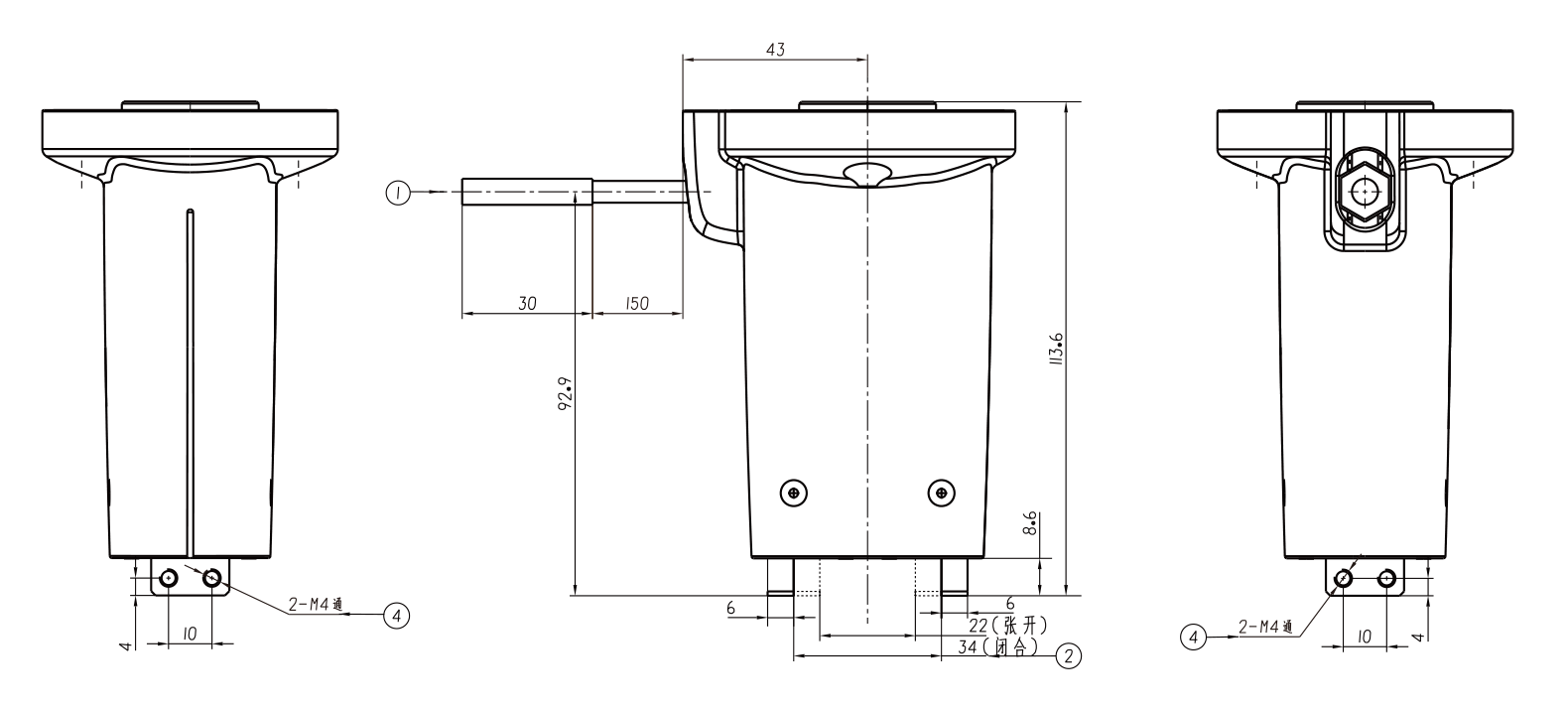
① RKMV8-354 Петожилни авионски утикач за RKMV8-354
② Ход електричне хватаљке је qwmm
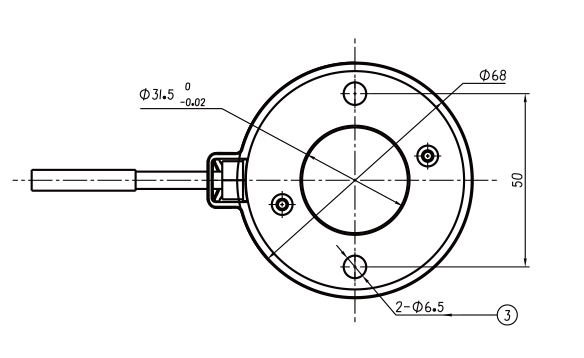
③ Положај инсталације, користите два завртња М6 за повезивање са прирубницом на крају роботске руке UR
④ Положај инсталације, положај инсталације уређаја (вијак М6)
Електрични параметри
Називни напон 24±2V
Струја 0,4 А

Наше пословање


Категорије производа
-

ХИТБОТ СЕРИЈА ЕЛЕКТРИЧНИХ ХВАТАЉА – Z-EFG-C5...
-

ХИТБОТ СЕРИЈА ЕЛЕКТРИЧНИХ ХВАТАЉА – Z-EFG-C3...
-

ХИТБОТ СЕРИЈА ЕЛЕКТРИЧНИХ ХВАТАЉА – Z-ECG-20...
-

DH ROBOTICS СЕРВО ЕЛЕКТРИЧНИ ХВАТАЉ ПГЕ СЕРИЈЕ –...
-

ХИТБОТ ЕЛЕКТРИЧНА ГРИППЕР СЕРИЈА – З-ЕФГ-26 Парал...
-

DH ROBOTICS СЕРВО ЕЛЕКТРИЧНИ ХВАТАЉ СЕРИЈЕ CG – ...