Колаборативни пнеуматски вакуумски генератор са два прста и меком хватаљком за аутоматизацију робота



Колаборативни пнеуматски вакуумски генератор са два прста и меком хватаљком за аутоматизацију робота
Главна категорија
Индустријска роботска рука / Колаборативна роботска рука / Електрична хватаљка / Интелигентни актуатор / Решења за аутоматизацију
Примена

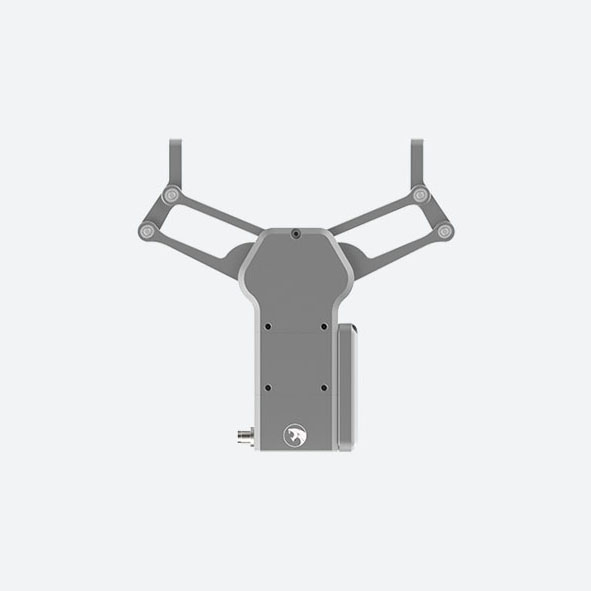
Роботски хватаљке серије SCIC Z-EFG су мале величине са уграђеним серво системом, што омогућава прецизну контролу брзине, положаја и силе стезања. SCIC најсавременији систем хватања за аутоматизациона решења отвориће вам нове могућности за аутоматизацију задатака које никада нисте сматрали могућим.
Карактеристика
· Велики мождани удар
· Подесива сила стезања и подесиви ход
· Дуг век трајања: десетине милиона циклуса, што превазилази ваздушне канџе
· Уграђени контролер: мале величине, једноставна интеграција
·EIA485 контрола магистрале, У/И
Сила стезања: 40-130N, Y-облик електричне хватаљке са ходом од 120 мм
Дуги ход
Укупан ход: 120 мм
Режим управљања
485 Modbus, EIA485, управљање магистралом
Сила стезања
Сила стезања 40-130N подесива
Контролер унутра
Покрива малу површину, лако се интегрише
Контрола тачности
Поновљивост: ±0,02 мм
Меко стезање
Може да стеже крхке и деформабилне предмете

● Промовисање револуције у замени пнеуматских хватаљки електричним хватаљкама, прва електрична хватаљка са интегрисаним серво системом у Кини.
● Савршена замена за ваздушни компресор + филтер + соленоидни вентил + вентил за гас + пнеуматски хватаљ
● Вишеструки век трајања, у складу са традиционалним јапанским цилиндром



Параметар спецификације
| Модел бр. Z-EFG-130 | Параметри |
| Укупно мождани удар | 120 мм |
| Сила хватања | 40-130N |
| Поновљивост | ±0,02 мм |
| Препоручена тежина хватања | Макс. 1 кг |
| Преношење режим | Навртка + спојница |
| Допуњавање масти покретним компонентама | Сваких шест месеци или 1 милион покрета / време |
| Време једносмерног замахног кретања | 0,9 секунди |
| Радни температурни опсег | 5-55℃ |
| Радни опсег влажности | RH35-80(Без мраза) |
| Режим кретања | Повезивање |
| Контрола можданог удара | Подесиво |
| Подешавање силе стезања | Подесиво |
| Тежина | 0,8 кг |
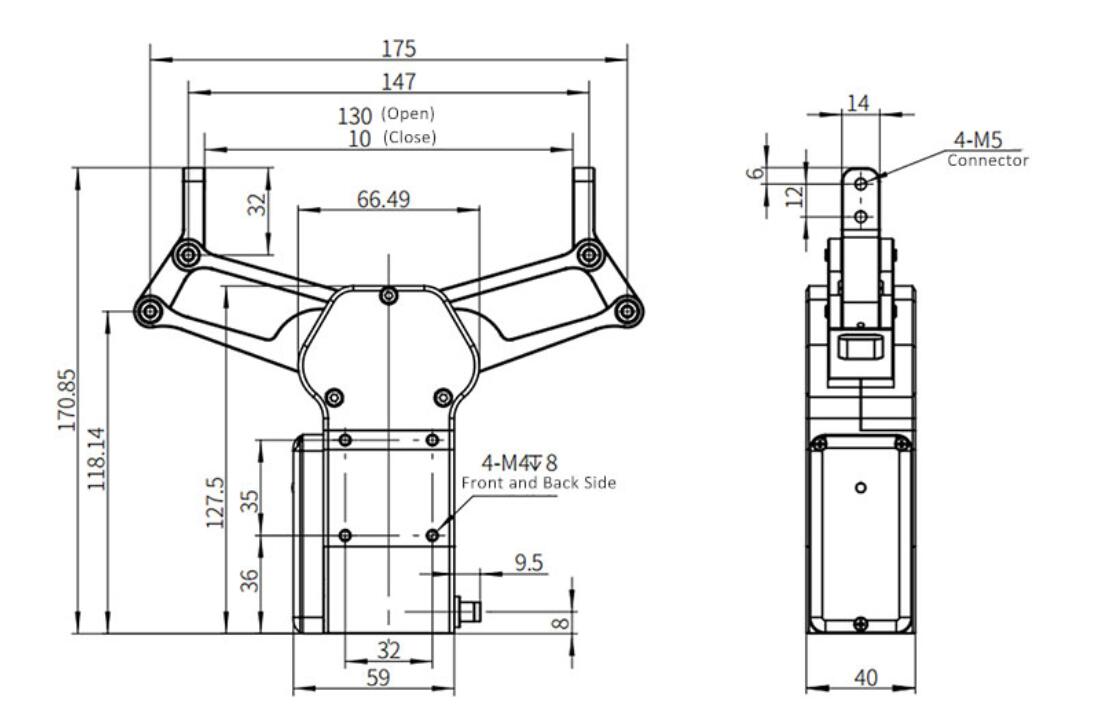
| Димензије(Д*Ш*В) | 171*187*40 мм (отворено) 218*66,5*40 м (затворено) |
| Положај контролера | Уграђено |
| Моћ | 10W |
| Тип мотора | DC без четкица |
| Вршна струја | 2A |
| Називни напон | 24V |
| Струја приправности | 0,4 А |
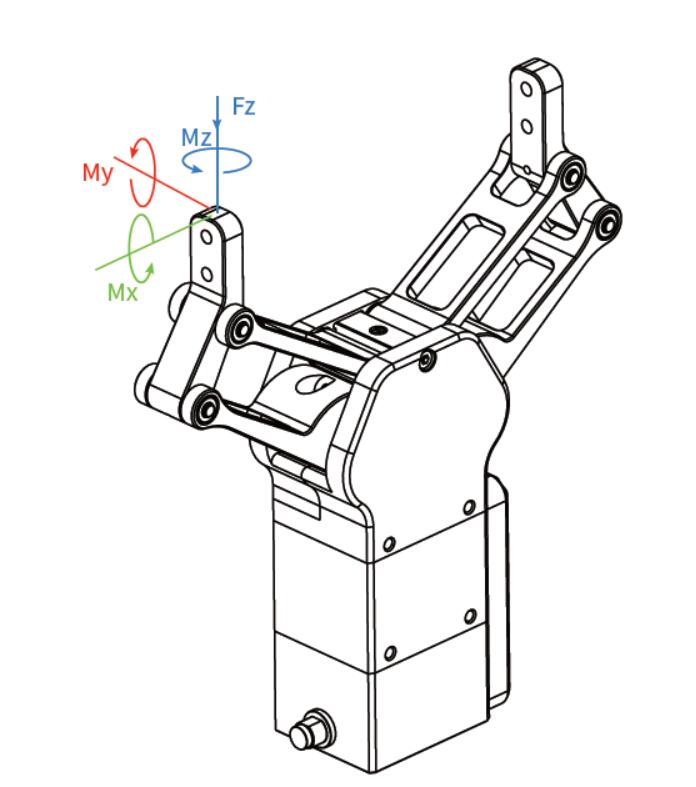
| Дозвољено статичко оптерећење у вертикалном правцу | |
| Фз: | 200N |
| Дозвољени обртни момент | |
| Мкс: | 2 Нм |
| Моје: | 2 Нм |
| Мз: | 2 Нм |
Укључи и користи, погодно за интеграцију
Електрични хватаљка Z-EFG-130 може бити компатибилан са колаборативном роботском руком и има интегрисани серво систем унутра, само једна хватаљка може бити једнака компресору + филтеру + соленоидном вентилу + гасу + ваздушној хватаљци.


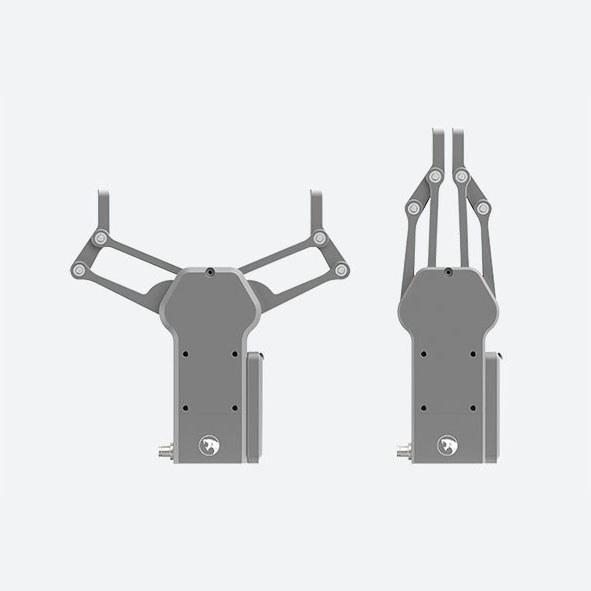
Дуг ход, одлична компатибилност
Ефикасан ход електричне хватаљке може бити до 120 мм, величина затварања је 10 мм, електрична хватаљка се може користити за полупроводничке чипове, 3C електронику и друге прецизне индустрије итд.
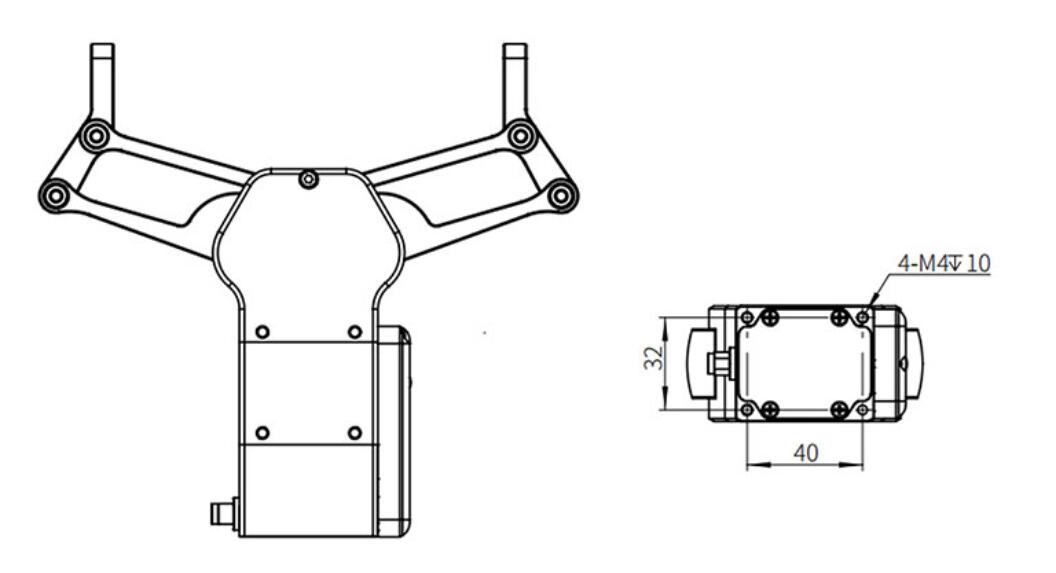
Мала величина, погодна за интеграцију

Величина отвора Z-EFG-130 је 171*187*40 мм, величина затварања је 218*66,5*40 мм, компактне је структуре, подржава више типова инсталација, има контролер унутра, покрива малу површину.

Прецизност Контрола силе
Електрична хватаљка користи посебан дизајн преносника и компензацију алгоритма погона, сила стезања је подесива од 40-130N, препоручена тежина стезања ≤1kg, и може остварити поновљивост од ±0,02mm.
Адаптивни хват, променљиви реп

Електрични хватаљка Z-EFG-130 подржава адаптивно стезање, погоднија је за кружне, сферне или предмете посебног облика, њени репни делови се могу лако мењати, купци могу стезати предмете према својим захтевима.


Вишеструки режими управљања, једноставни за руковање

Електрични хватаљка се може прецизно контролисати путем Modbus-а, његова конфигурација је једноставна, за коришћење комуникационог протокола дигиталног I/O, потребан је само један кабл за повезивање са ON/OFF, компатибилан је са главним PLC управљачким системом.
Померање тежишта оптерећења
Наше пословање


Категорије производа
-

Конкурентна цена индустријског робота са 6 осовина, манипулатор...
-

Индустријска машина за брање и постављање јаја и воћа велике брзине 4 ...
-

Добот шестоосна колаборативна роботска рука са зглобом...
-

Дугачка роботска рука, војни телескопски манипулатор 20...
-
Врућа продаја роботске руке, метална 6-осна механичка роботска...
-

Индустријска машина, роботска рука са 4 осе, манипулатор...